서울과학기술대학교 기계시스템디자인공학과 SENS 연구실입니다.[19614]
김정한 교수: hankim@seoultech.ac.kr, 02-970-6397
서울과학기술대학교 기계시스템디자인공학과 SENS 연구실입니다.[19614] 김정한 교수: hankim@seoultech.ac.kr, 02-970-6397 |
직접구동방식의 초정밀 속도리플 제어기의 개발 (Development of a precision velocity ripple controller) 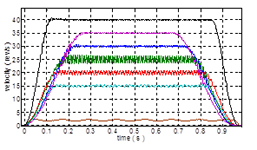 |
회전하는 모터는 그 구조적인 특성상 반드시 커뮤테이션이 필요하기 때문에, 발생하는 토크에 어느정도 리플이 존재합니다. 일반적인 상황에서는 감속기등이 로우패스 필터 역할을 하면서 리플을 줄여주는 역할을 하지만 최근에 많이 사용되는 직접구동방식의 경우, 감속기 없이 바로 모터와 연결되어 있기 때문에, 발생하는 토크가 출력에 많은 영향을 줍니다. 특히 제어대상체가 정밀 가공장비일 경우는 이러한 리플이 가공대상체의 품질 및 정도에 직접적으로 영향을 미칩니다. 모터에서 발생하는 리플에 대한 연구는 기존에도 많은 연구가 있었는데, 대부분 모터의 드라이버 단에서 직접적인 전류제어를 통해서 토크리플을 제어하는 방법을 주로 연구하였습니다. 이러한 경우 모터와 그라이버를 셋트로 사용하지 않으면 적용하기가 매우 어렵게 됩니다. 또한 같은 모델이라 하더라도 생산된 제품은 제각기 리플의 특성이 조금씩 달라서 실제 상용화하기가 매우 까다롭습니다. 본 연구에서는 드라이버단이아닌 상위제어기에서 현재 장착된 모터의 리플특성을 자동으로 검출하여 이를 피드포워드로 제어하여 토크리플보다는 실제로 사용자에게 중요한 속도리플의 제어를 목표로 하는 속도리플 제어 알고리듬을 개발진행하고 있습니다. 본 연구는 한국기계연구원과 공동으로 진행하고 있으며, 나노 패턴 금형가공기에 실제로 장착하여 성능을 높이는데 일조합니다. |
반도체용 Chiller 광대역 정밀 온도 제어기의 개발 (Precision wide range temperature controller) 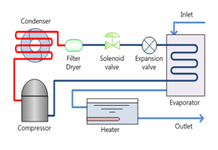
|
반도체용 Chiller는 반도체 공정중 사이 사이에 쓰이는 온도제어 장비입니다. 반도체나 디스플레이 공정은 상당수 작업이 고온에서 이루어지기 때문에, 단계별로 온도제어기가 필요합니다. Chiller 는 이러한 생산공정 중간에 정확히 제어된 온도의 냉매를 공급하여 재료 및 장비를 다음 공정에 맞는 온도로 제어해주는 장비입니다. 따라서 온도제어 대상으로 순환하는 냉매가 따로 있고, Chiller 내부에 또하나의 냉동 싸이클이 존재하는 이중구조로 되어 있습니다. 냉매가 외부로 순환하는 구조인데다가 제어 대상물이 인라인 상태에서 지속적으로 들어오므로 온도제어에 있어서 외란이 매우 심하고, 제어목표 온도가 광범위하게 변할 수 있습니다. 이러한 경우 시스템에서 제공하는 열량 대비 순환하는 냉매의 온도변화의 전달 함수가 상당히 큰폭으로 변화합니다. 본 연구에서는 큰 비선형성을 가지며, 넓은 제어영역때문에 전달함수가 변화하는 시스템에 대해서, ARMAX 모델을 사용하여 다중 전달함수 모델을 구성한다음, 게인 스케줄링 방법을 이용하여 본 특성에 맡는 광대역 정밀 온도제어기를 개발하였습니다. |
디스플레이용 노광기의 6축 레티클 제어기 (6-axis reticle controller for lithographer) 
|
노광기(Lithographer)는 반도체 및 디스플레이 공정에서 사용되는 가장 고가이고, 가장 정밀한 모션장비입니다. 노광공정에서는 특정 파장의 에너지를 매스크를 통과시켜 감광 재료에 노출하여
원하는 전기적 패턴을 형성하고, 또 MEMS의 경우에는 기계적인 형상을 가공하기도 합니다. 본 과제에서는 패턴의 형상이 식각되어 있는 레티클을 6축의 자유도를 가지고 제어해주는 특별한 구조의 제어기를 개발하고 있습니다. 회전 정밀도가 1urad에 이르며, 리니어 정밀도가 0.1um로 기존 제어기에는 포함되지 않는 특수한 구조의 역기구학 해석기와 오차보정알고리듬을 포함합니다. 본 초정밀 6축 스테이지는 디스플레이용 노광기 뿐 아니라 다양한 용도의 나노 스테이지로 사용가능하며, 현존하는 6축 나노 스테이지 중 가장 상용화가 손쉬운 구조입니다. |
VHDL을 이용한 마이크로스텝 제어기 개발 (Development of a micro stepping control chip) 
|
마이크로 스텝핑 기술은 스텝모터의 한 스텝각(1.8 or 0.9도)을 1/256 이나 1/512 등으로 채배하여 매우 정밀하게 제어하는 기술입니다. 마이크로 스텝핑 기술을 사용하면 탈조가 발생하는 영역을 줄일 수 있으며, 구동시 발생하는 소음과 진동 또한 현저히 줄일 수 있습니다. 따라서 배율이 높은 줌 카메라 등의 제어에 상당히 유리합니다. 마이크로 스텝핑을 이용한 고속구동은 매우 높은 주파수의 동작신호와 짧은 신호지연이 필수적이기 때문에 일반 마이크로 콘트롤러를 활용하여 소프트웨어로 제어했을 때보다는, VHDL을 사용하여 직접 H/W 레벨에서 제어하는 것이 훨씬 더 좋은 성능을 발휘합니다. 본 연구에서는 이러한 초고속 마이크로 스텝핑 모션 제어기를 알테라의 싸이클론 FPGA를 활용하여 개발 구현하였습니다. |
새로운 모션 구동 프로파일 및 최적화 알고리즘 개발 (Development of a new motion profile and controller) 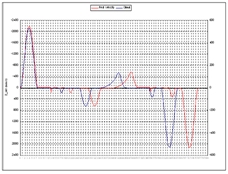
|
반도체 장비에 사용되는 모션 제어기술은 다음과 같은 몇 가지 하위 기술로 분류할 수 있습니다. 시스템의 동역학적 특성에 맞는 레귤레이팅 및 트랙킹 제어기술, 제어의 목표치를 이루는 모션 프로파일 및 피드포워드 제어기술, 기구적인 공진을 회피하는 디지털 필터기술, 안정적 H/W 및 기타모듈과의 통신기술 등 4가지의 하위기술을 가집니다. 이 중에서 시간축상에서 제어 목표치의 연속점을 이루는 모션 프로파일과 피드포워드 제어기술은 구동기기가 고속, 고정도일 수록 매우 중요해지며, 구동시 기구물의 진동과 성능에 막대한 영향을 미칩니다. 본 연구는 Sawing & Placement 장비 전세계 1위인 한미반도체와 공동으로 연구/개발하고 있는 프로젝트입니다. 최근에는 설비의 대형화로 인하여 모듈간 통신을 고려한 메카트로링크를 사용한 원거리 통신에서의 설계기술도 함께 개발하고 있습니다. |
|
와이어본더의 초고속 모션 제어기 개발 (Motion control for wirebonder) 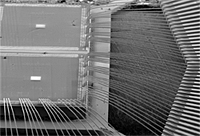
|
와이어본더는 Z축 약 160G, XY축 약 12G의 매우 높은 가속도를 가지고 움직이며, 20um 정도의 가느다란 금실로 패드와 리드사이에 초당 15개이상의 연결을 해내는 매우 고기능의 반도체 후공정 장비입니다. 와이어본더의 제어는 고속구동기중 전세계에서 HDD 제어와 더불어 가장 빠르고 정밀한 제어기를 필요로 합니다. Z축의 경우 160G로 가감속이 이루어지면서도 다이내믹에러를 3um이내로 제어하는 성능을 가지고 있습니다. 본 연구에서는 이러한 초정밀 모션 제어기를 위한 피드백 제어 알고리듬, 피드포워드 생성기, 디지털 필터등 첨단 기술을 활용하여 실제 장비에 적용하여 현재 국내 S사에서 판매하고 있습니다. |
| 와이어본더의 초정밀 힘제어 (Precision force control for wire bonder) 
|
와이어본더의 Z축 모터에는 순간적으로 최대 약 10A 가까이 전류가 흐르면서도, 힘제어모드에서는 패드에 접촉하는 순간의 충격량을 1gram 이내의 정밀도를 가지고 제어합니다. 이를 위하여 Z축의 제어는 S/W 뿐아니라 H/W 또한 아주 특수한 구조로 이루어지어 최대 해상도와 넓은 다이내믹 레인지를 동시에 유지할 수 있도록 설계합니다. 와이어본딩 작업중 약 8ms 정도 행해지는 힘제어 알고리듬은 거의 대부분의 Force controller 에서 문제없이 활용할 수 있을 정도로 최고의 정밀도를 가지며, 접촉순간의 미세한 충격량을 제어할 수 있는 알고리듬을 포함합니다. |
|
SMT의 고속 정밀 모션 제어 (Motion control for SMT machine) 
|
칩 마운터는 헤드에 다수의 진공 흡착 기구를 이용하여 표면 장착 부품을 PCB위에 배치시키는 장비입니다. 이를 위하여 XYZ Gantry 구조가 필요하며, Z축의 진공 흡착축은 회전 보정을 위하여
별도의 theta축을 가지며, 칩의 이송중 현재 노즐에 붙어있는 칩의 Translation, rotation 조정을 위하여 고속의 비젼 카메라가 사용됩니다. 칩마운터는 Pick and Place Machine 이라고도 불리며, 편의상 고속기, 중속기, 저속기로 나뉩니다. 이중 가장 시장이 넓은 중속기에는 사진에서 보는 것처럼 Gantry 형태의 XYZ 스테이지가 많이 사용되며, 이러한 형태는 각종 검사장비 및 핸들러등에도 많이 사용됩니다. 본 연구에서는 이러한 고부하의 헤드를 약 4G 이상의 가속도를 가지고 구동하는 제어기 및 프로파일 생성기, 디지털 필터, 진동 억제 알고리듬, 비대칭 프로파일등의 기술을 포함합니다. |
차량용 6축 자세센서 개발 (IMU sensor for cars) 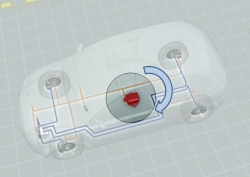
|
일반적으로 VDC(Vehicle Dynamics Control) 혹은 ESP(Electronic Stability Program)이라 불리는 장치는 차량의 동력학적 특성을 크게 향상시켜, 위급한 상황시 차량의 안정성을 대폭 향상시킵니다. VDC가 장착된 차량은 운전자의 의도를 파악할 수 있는 조향각 센서, 각 바퀴의 속도센서, 차체의 회전 각속도등을 측정하는 IMU(Inertial Measurement Unit), 마이크로 컨트롤러 등을 사용하여, 각바퀴의 브레이크 및 엔진 출력을 제어하여 위급한 상황에서 차량의 동체가 슬립에 의하여 회전하지 않도록 막아줍니다. VDC는 중형차급 이상에 주로 장착되고 있었으나, 안전성의 확보를 위하여 최근 소형차등에도 기본적으로 장착되고 있는 추세입니다. 본 연구실에서는 현대자동차, 만도기계와 협력하여 VDC 의 핵심인 차량용 자세제어 센서 유닛(IMU)를 개발하고 있습니다. ESP관련 동영상 |
RoboCargo - [RoboCaddie] (Autonomous Robot Cargo Carrier) 
|
본 프로젝트는 자이로스코프와 가속도계를 사용한 IMU와 DSP 모션 제어기를 사용하여, 자체적으로 균형을 잡고 회전 및 이동가능한 화물수송용 로봇 카트입니다. 이러한 방식의 카트는 매우 협소한 장소에서도 제자리 회전이 가능하며, 매우 안정적인 동작을 보여줍니다. RoboCargo의 반자동 모드에서는 사용자가 매우 손쉽게 카트를 제어할 수 있으며, 손잡이를 슬쩍 당기고 미는 것만으로 무거운 화물을 손쉽게 수송할 수 있습니다. 특히 언덕길등을 이동할 때 사람의 동력을 전혀 사용하지 않으므로 매우 편리하며, 안정적입니다. RoboCaddie는 이러한 RoboCargo에 비젼센서를 덧붙여서 자동으로 골퍼를 추종할 수 있도록 한 로봇입니다. 본 프로젝트는 2009 대한민국 녹색에너지대전에 전시되었고, 많은 언론의 이목을 받았습니다. RoboCargo는 공항카트, 대형쇼핑몰, 우유배달, 공사장의벽돌수송등 다양한 용도로 사용할 수 있습니다. 로보캐디는 SBS 아이디어 하우머치 112회 (2010.11.4일자 방송)에 그림자 로봇이란 이름으로 방영되었으며, (주)사이보그랩에 낙찰되었습니다. 사이보그랩의 무궁한 발전을 기원합니다. |
휴머노이드 로봇용 3차원 자세센서 개발 (3D Pose sensor for humanoid robot) 
|
휴머노이드 로봇이 인간과 같이 계단이나 기울어진 경사면을 올라가고, 다이나믹한 상태에서 몸의 중심을 잡으려면, 인간의 전정기관에 해당하는 자세센서의 성능이 매우 중요합니다. 인간이나 로봇은 자체적인 동작과 이동이 가능하기 때문에 지구의 중력가속도 이외에도 자체적인 속도 및 가속도를 가지므로 지구에 의한 중력가속도와 로봇 자체의 가속도값을 분리해 내는 작업이 매우 중요합니다. 본연구에서의 3차원 자세 센서는 내부적으로 가속도계 3개와 자이로 스코프 3개를 기본으로 탑재하고 있으며, DSP를 이용하여 고속의 연산을 수행합니다. 3차원 자세센서의 출력은 현재 로봇의 롤,피치, 요우각등 자세뿐 아니라 환산된 좌표에서의 가속도 및 각속도 값 또한 출력합니다. 본 연구에서는 추정오차를 최소화 할 수 있는 특별한 방식의 스위칭 모드 알고리듬을 개발하여 휴머노이드의 움직임에 적합한 3차원 자세 센서 알고리듬을 개발하였습니다. 기술적으로는 3차원 자세센서가 비행기, 정밀 미사일 등에서 사용되는 AHRS (Attitude and Heading Reference System)등과 유사하며, 여기서 출력되는 기준 좌표 환산 가속도 값을 두번 적분하기만 하면 바로 INS 시스템이 될 정도로 상당히 고난이도의 변환 및 필터링 알고리듬이 장착되어 있습니다. 3차원 자세센서는 휴머노이드 로봇 뿐 아니라 일반 SUV등 자동차, 무인 항공기, 무인 차량, 로봇 청소기 등 다양한 응용분야를 가지고 있습니다. |
| INS용 초정밀 가속도계의 개발 (Precision servo accelerometer for INS)  |
시간당 오차가 1.8km 이하인 중급 INS에 사용되는 가속도계는 적어도 중력가속도의 약 0. 01% 이하의 변화를 감지해야 합니다(자이로스코프의 경우는 시간당 드리프트가 0.01degree 이하). 따라서 INS용 가속도계는 스프링이나 스트레인 게이지, 피에조 등을 사용하는 패시브 타입의 가속도계는 사용하지 못하며, 펜들럼과 정밀 센서가 내장된 서보타입 센서를 사용해야 합니다. 서보타입의 가속도계는 장거리 미사일등에 핵심 부품이며 가격 또한 매우 고가일 뿐 아니라 전략적으로도 매우 중요하며, 일정 정밀도 이상의 가속도계는 수출금지항목이라 선진국에서 수입하는 것 또한 불가능합니다. 서보타입 가속도계의 제어는 아나로그와 디지털 기술의 첨단 복합기술이며, 초정밀 전류제어 기술 및 측정기술, 온도보상 기술등을 필요로 합니다. 본 과제는 러시아 모스크바에 있는 전문 연구기관과 공동연구로 수행되었습니다. |
|
무인잠수정용 MRU 개발 (Motion reference unit for autonomous underwater vehicle)  |
MRU(Motion Reference Unit)는 무인 항공기 및 무인 잠수정등에서 사용되는 관성센서를 사용한 현재의 위치 추적 시스템입니다. 구조와 알고리듬은 INS와 거의 동일하며, 비교적 저가의 센서를 사용하여 정밀도만 INS 보다 약간 낮습니다. 대부분의 경우 짐발이 없는 Strap-down 방식을 사용하며, 쿼터니안이나 오일러 앵글, Direction cosine등을 이용하여 좌표를 변환하고, 기준 좌표계에 대한 가속도 값과 각속도 값을 최적 필터링하여 현재의 위치를 출력합니다. INS도 마찬가지이지만 MRU 또한 GPS나 기타 센서의 출력을 퓨젼할 수 있습니다. 본 연구는 심해 무인 잠수정을 위한 MRU 시스템에 대한 연구이며, 소형 저가의 센서를 사용하여 설계되었습니다. |
차량용 GPS 디지털 필터링 알고리듬 개발(Digital Kalman filter for GPS navigation system, 1998) |
GPS(Global Positioning system)은 미국이 소유한 전 세계적인 위치 추적 시스템입니다. 지구 위 약 20,000km 상공에 24개의 위성이 돌고 있으며, 이중 4개이상의 위성과 수신이 가능해지면 지구상에서 3차원으로 현재 위치의 파악이 가능합니다. GPS는 원래 미국에서 군사용 시스템으로 개발되어서 오차가 거의 없는 군수용 P-code 와 민수용 C/A-code(오차 약100m)로 나누어져 있었습니다. 민수용 C/A-code에는 적국에 의하여 악용되는 것을 방지하기위하여 S/A라는 고의 오차를 섞어놓았었는데, 2000년에 GPS시스템의 민간이용확대를 위하여 S/A를 삭제하여 현재는 위치 오차가 필터링만 잘 하면 3m 이내로 정확하게 구할 수도 있습니다. 본 연구는 S/A가 삭제되기 이전의 오차가 매우 큰 GPS 신호를 예측기와 디지털 필터링으로 오차를 더욱 줄이는 알고리듬에 대한 연구로서, 디지털 칼만 필터와 상태 예측기를 이용하여 차량용 네비게이션에 적용할 수 있는 알고리듬에 대한 연구입니다. |
Zigbee 무선조명 제어 솔루션 LICON (Development of Zigbee Lighting Controller)  |
본 연구는 조명제어를 위한 Zigbee 통신 및 전류 제어에 관한 솔루션 개발에 대한 연구입니다. 본 무선조명 제어 솔루션 LICON은 크게, 조명제어용 통신 Protocol 및 S/W, 무선통신 H/W, 그리고 LED Dimming을 위한 전류제어기 세가지로 구성됩니다. 특히 LICON의 무선통신 프로토콜은 기존의 통신 Overhead가 많고, 통신 지연이 많이 발생하는 MESH 방식과는 완전히 달리, 조명제어용으로 특수하게 개발된 Protocol을 사용하므로 통신지연이 극소화되며, 전자파 발생 또한 최소화 할 수 있습니다. 최근 들어, 형광등보다 효율이 좋은 조명용 LED가 양산되기 시작하였습니다. 그린 에너지 산업의 폭발적인 성장에 발 맞추어 현재 LED 조명기기의 보급은 매우 가속화 되어 있는 상황입니다. 본 연구에서는 조명 시스템의 최적제어를 위한 Zigbee통신 시스템 및 전류제어기를 통합 구현하여 개발하였습니다. 본 조명제어 시스템은 건물내의 일반 조명제어 뿐 아니라, 건물 밖 외관용 조명제어, 가로등 및 Intelligent pole, 루미나리에 등 다양한 분야에 응용될 수 있습니다. 기술 및 협력에 관한 문의 환영합니다 |
유선통신 Harnessing 솔루션 Smart Link (Smart Link)  |
본 연구는 여러 가닥의 전선 뭉치를 단 두 가닥의 전선으로 통합하여 전송해 주는 유선통신 칩의 개발에 대한 연구입니다. 본 Smart Link 솔루션은 여러 가닥의 디지털 신호들을 통합하여 시리얼 통신으로 최대 1km(최대 전송 거리는 모델에 따라 다름)까지 전송할 수 있습니다. 본 연구실에서는 시리얼 to 패러랠 엔진을 VHDL을 사용하여 개발하여, 사용자의 요구에 따라 다양한 형태로 변형하여 제공할 수 있습니다. 사진에 보는 M type 모델은 Peer to Peer 뿐 아니라 Multi-Drop 솔루션(단일 케이블상에서 각 칩들이 각기 다른 전송주소를 가짐)을 제공함으로써 공장내의 설비나 건물내의 센서 신호 전송등에 사용되는 케이블을 획기적으로 줄일 수 있습니다. 또한 칩 내에 정교한 디지털 필터를 장착함으로써 신호의 전송중 발생할 수 있는 Glitch를 방지합니다. 기술 및 협력에 관한 문의 환영합니다. |
Zigbee 센서 네트웍 시스템 (Development of Zigbee sensor network)  |
최근 많은 연구가 진행되고 있는 센서 네트워크는 그 유용성으로 인하여, 다양한 어플리케이션을 대상으로 적용이 연구되고 있습니다. 센서 네트워크는 기존의 Star형 토폴로지를 사용한 게이트웨이형 통신이 아니라 스스로 Re-routing 을 할 수 있으며, 개체의 에너지 소모를 극소화 할 수 있는 소형의 저 에너지 사용 관점에서의 네크워크 방식입니다. 본 연구에서는 저가 소형의 AVR 및 소형 배터리를 이용하여, Re-routing 및 Mote의 에너지 소모를 극소화하며, Mote의 쉬운 관리를 위한 특별한 알고리듬을 연구중입니다. 이러한 Mote는 넓은 범위에서의 온도 및 각종 센서의 정보 수집, 휴양지 및 병원에서의 의료 장비에의 응용, 가속도계 센서 네트워크등 보안 관련 분야, 숲속에서의 적군의 탐지등의 군사용 분야에서 손쉽게 사용할 수 있습니다. 본 실험실에서 개발하고 있는 Mote는 의료장비 및 U-healthcare시스템용, 보안관련산업 및 공장/산업용 현장, 군사용으로 매우 쉽게 사용할 수 있는 고신뢰성 타입의 프로토콜 및 하드웨어를 개발하고 있습니다. |
| 시리얼 데이터 출력형 엔코더의 패러랠 데이터 변환칩의 개발 (Parallel interface convertor for serial output encoder)  |
모터의 피드백 장치중 가장 많이 사용되는 것이 엔코더입니다. 엔코더의 기본 신호는 90도의 위상차이를 가지는 A,B상 2개의 신호로 구성되어 있고, 이 두 개의 신호의 위상차이를 이용하여 정/역회전을 구별하고, State의 변화를 빠른 주파수로 감지하여 4채배 로직을 적용하여 해상도를 증폭하여 사용합니다. 그런데 모터의 회전수가 높아지고, 제어기와 모터사이의 거리가 멀어질수록 신호를 전달하는 전선의 Stray-capacitance의 작용으로 A상과 B상의 위상차이에 잡음이 섞이게 되며, 이는 카운터의 4채배 로직에 치명적인 손상을 주어 정상적인 제어를 방해합니다. 이러한 문제를 해결하기 위하여 최근에 개발/판매되는 산업용 모터들은 엔코더에 카운터를 내장하고 절대적인 위치를 시리얼 통신을 전송하는 방식을 사용합니다. 하지만 이러한 신형 모터를 사용하려면 고가의 제어기 및 Host S/W 까지 모두 교체해야 하므로 매우 큰 비용이 발생합니다. 본 연구에서는 이러한 신형 모터에서 발생하는 시리얼 신호를 Decoding 해주어 직접 제어기의 DSP에 인터페이스 할 수도 있고, 또한 기존의 A상/B상을 Regeneration 해 주어 기존의 구형 제어기에 바로 인터페이스 할 수 있도록 해 주는 칩을 VHDL을 이용하여 한개의 FPGA에 구현하였습니다. 본 개발 칩은 모터 /앰플리파이어 전문기업인 컨벡스를 통하여 양산/판매될 예정입니다. |
| PMD칩을 활용한 통신 및 Interpolator 보드의 개발 (Development of DSP controller for PMD motion controller)  |
모션 전용 제어기와 호스트 컴퓨터 사이에는 매우 빠르고 신뢰성있는 통신이 필요합니다. 기존의 모션 제어카드의 경우, 단 하나의 모션 명령을 넘겨받아 이를 수행하고 다시 호스트 제어기로부터 명령을 넘겨받고 수행하고 하는 방식을 주로 사용하였습니다. 이런 방식의 통신은 호스트 컴퓨터의 Real time 능력을 크게 요구하며, 부하를 크게 늘리는 것 말고도 장기간에 걸친 신뢰도에 문제가 되는 경우가 많습니다. 모션제어가 사용되는 대부분의 장비는 자체 진동이 심하므로, 장비가 출하된 지 약 2-3 년이 지나면 이러한 진동이 컨넥터등의 접촉 불량을 유발하여 알 수 없는, 그리고 아주 불규칙한 에러를 생성해 내는 경우가 있습니다. 따라서 모션 제어에서의 통신은 그 신뢰도가 매우 중요하며, 타이밍의 제어를 기존의 인터럽트방식으로만 처리하는 것은 장비의 고속화 및 고신뢰성의 확보에 걸림돌이 됩니다. 본 연구에서는 모션 프레임의 개념을 도입하여, 호스트 컴퓨터와 제어기간의 통신을 특수한 구조의 프로토콜을 이용하여, 여러개의 움직임(모션 프로세스)에 대한 명령을 묶음으로 처리하며, 동기가 필요한 것은 레지스터와 H/W를 이용하여 효율적으로 처리하였습니다. 또한 본 과제에서는 PMD의 외부 메모리 접근 방법을 사용하여 다양한 보간 프로파일을 생성하여, 직선 보간 뿐 아니라 원, 스프라인 등의 고차 함수 또한 수월하게 보간할 수 있는 알고리듬을 개발하였습니다. |